


Cable Driven Hyper Redundant Robot Join
3 downloads · 3 years ago · This is a single joint for a multi joint cable driven hyper redundant robot. This joint can be stack
This is a single joint for a multi joint cable driven hyper redundant robot. This joint can be stacked back to back to create a multi joint robot.

Guardian Robot, Fully 3D Printed, Articulating, Pen Holder, Pencil Holder, Cable Holder

Cable Carrier Assembly

Cable Carrier 22mm x 24mm
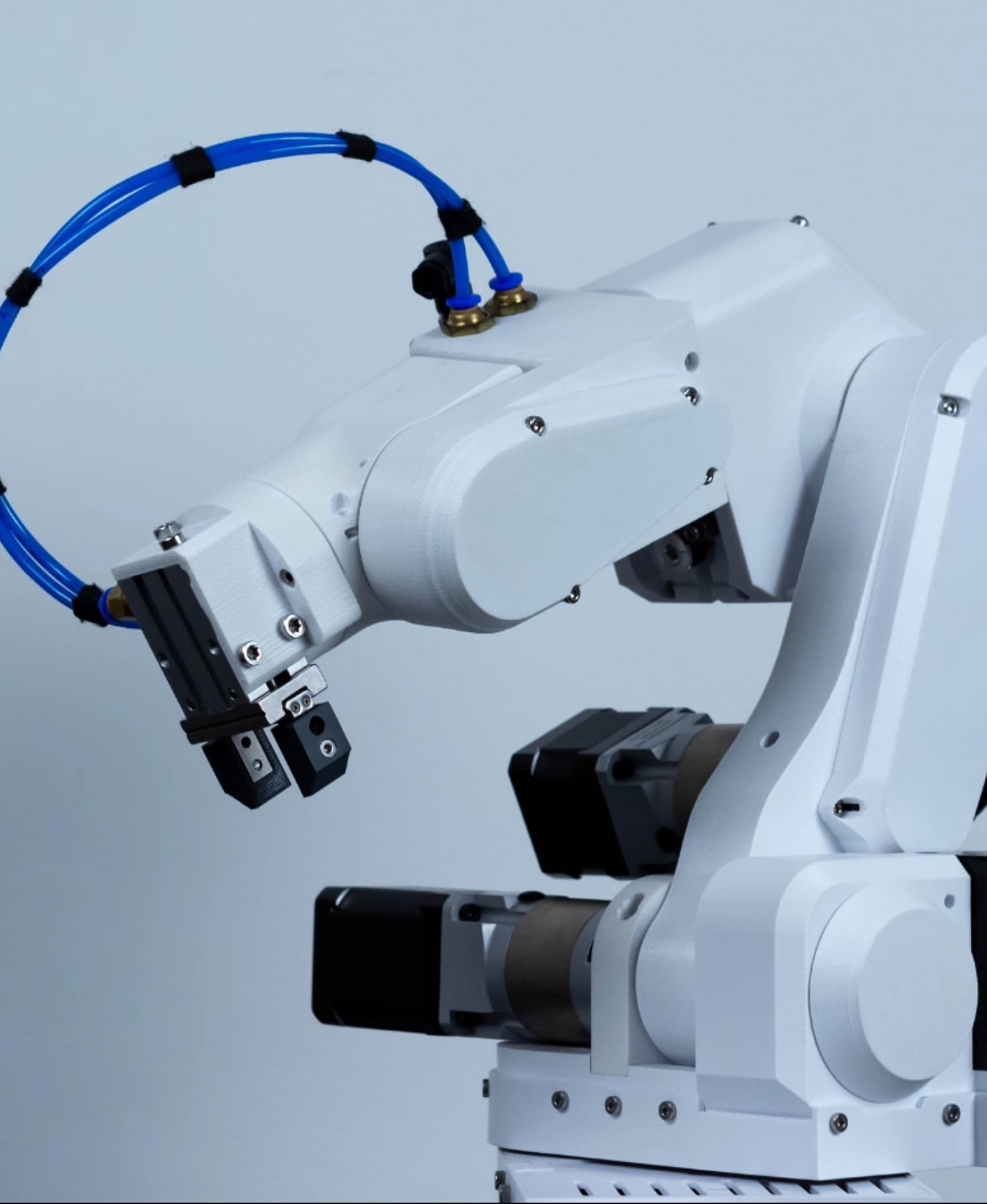
PAROL6 Desktop robotic arm

Deskimon - Charging Dock

Crushinator -Futurama

CyberSkull Apex

RJ11 RJ45 Adapter Holder - Gridfinity

Reductor Cable con NUEVO Soporte para torque TRES.stl
Mechanical Handling Tool (with finger gripper)

Q1 robot custom parts (with scad)

ROTATING TABLE WITH NEMA 17

Gulfcoast Robotics LED Light Bar Ender5 Reverse Mounts

15lb Battlebot - Queen of Hearts

Steampunk Robot Owl Storage Jar

FHW: Worker Bot Sergeant Bannerman set

Ultimate 1/64 Japanese Vending Machine - LED Ready & 3 Sticker Themes

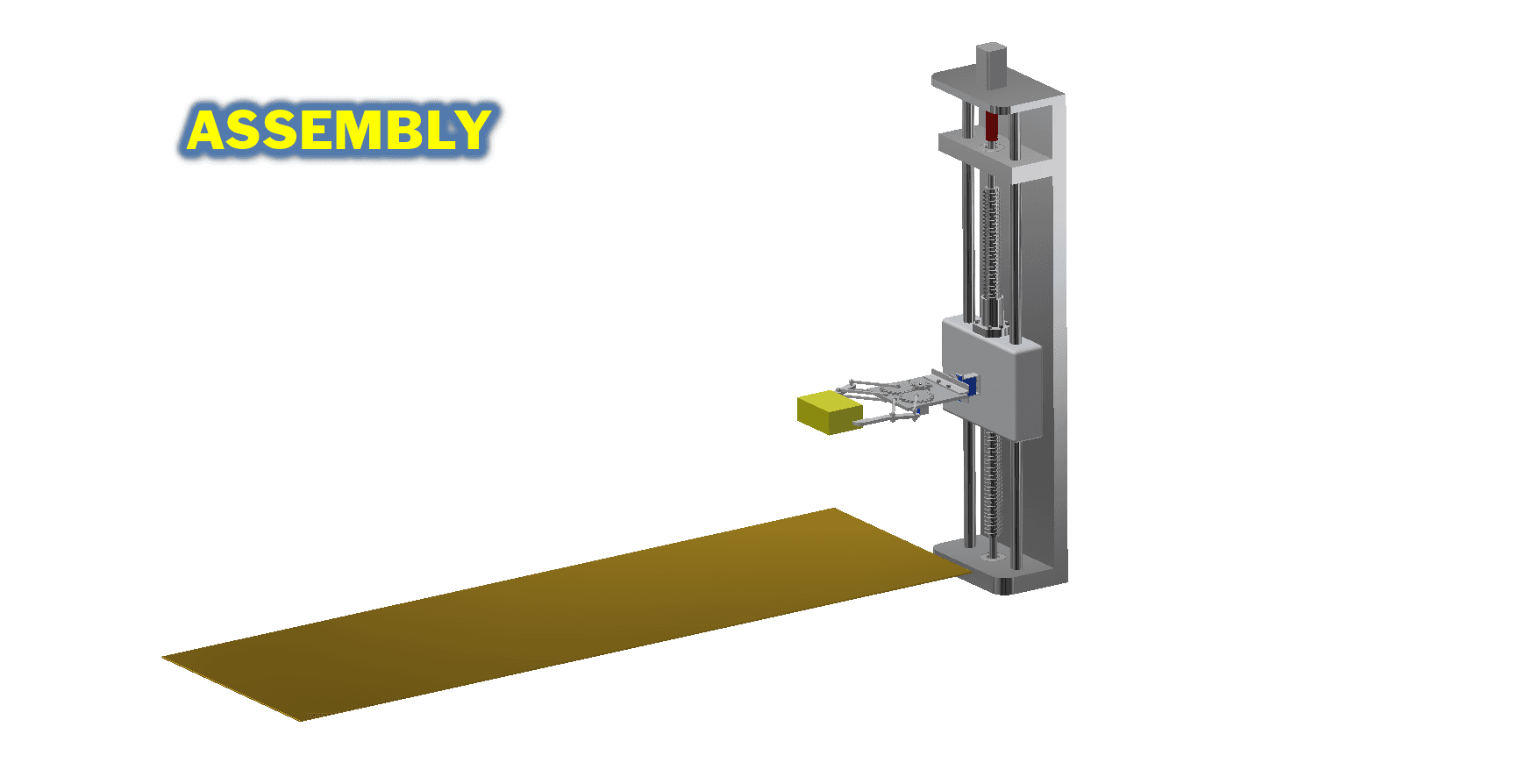
Vertical Lifter Limit switch

FHW: NecroMind Hq Unit
