

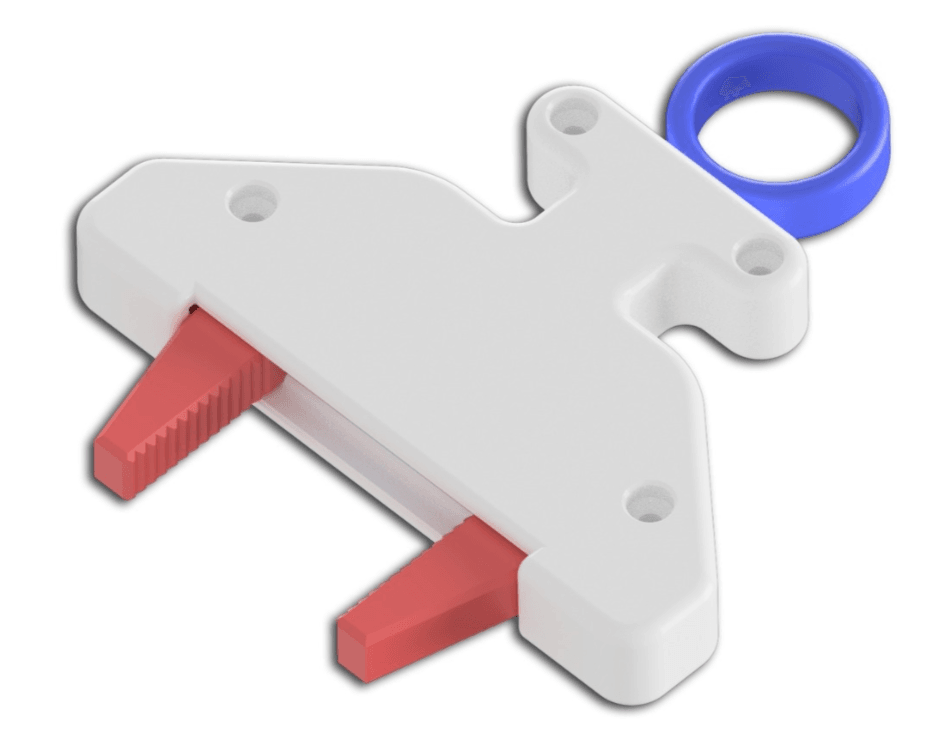


2 Jaw Locking Gripper
Moving the activation rod opens and closes the gripper fingers. The activation rod is connected to two gear pinions with pivoting linkages. As the rod moves linearly it rotates the gears which intern engages the gear racks on the bottom of the gripper fingers moving them in and out equally. When the fingers are fully closed they lock out as the linkages go past their center point. The parts for this gripper printer separately without supports and assemble using fasteners.
Required Fasteners: (4X) M3 x 10mm Lg. Socket Head Cap Screws (4X)- M3 Hex Nuts
Note: Assembly model for reference only.
Support and Licensing If you would like to help support more free models, or get permission to sell physical copies of my models, consider joining my Patreon

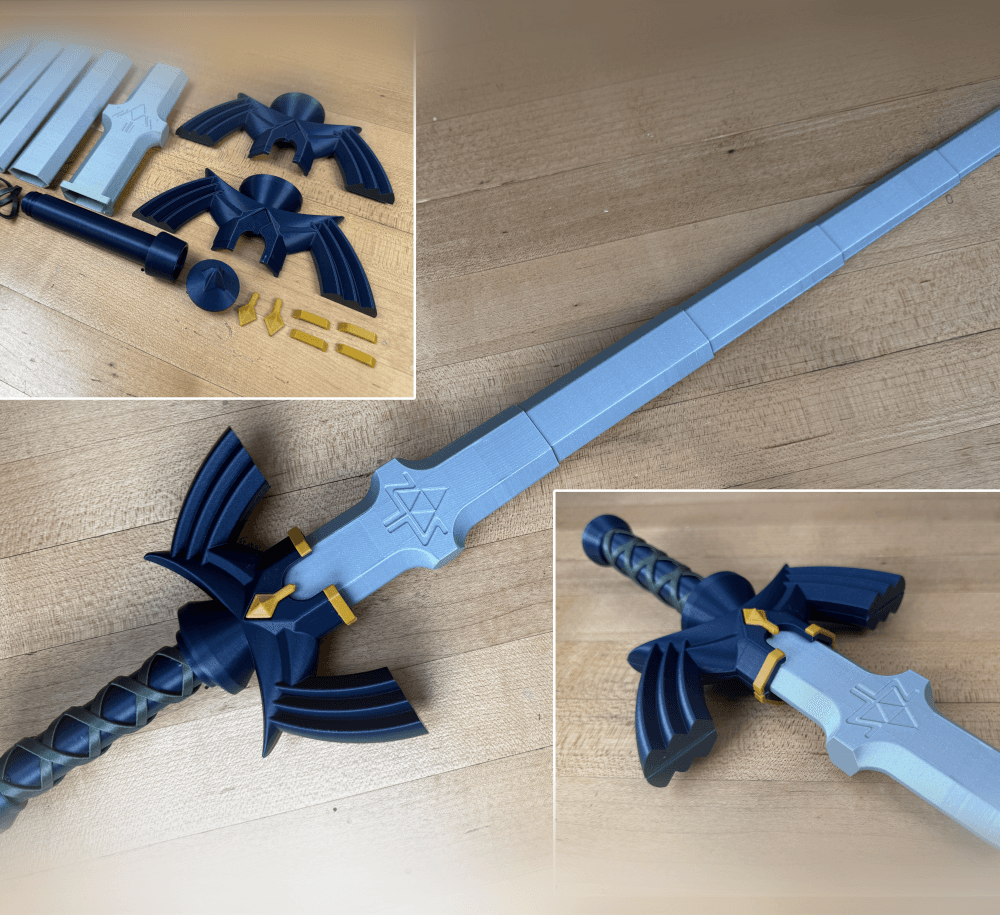
Expanding Master Sword

Lightsaber Belt Clip

Luke’s ROTJ Multi-Part Collapsing Lightsaber

BYOK #10

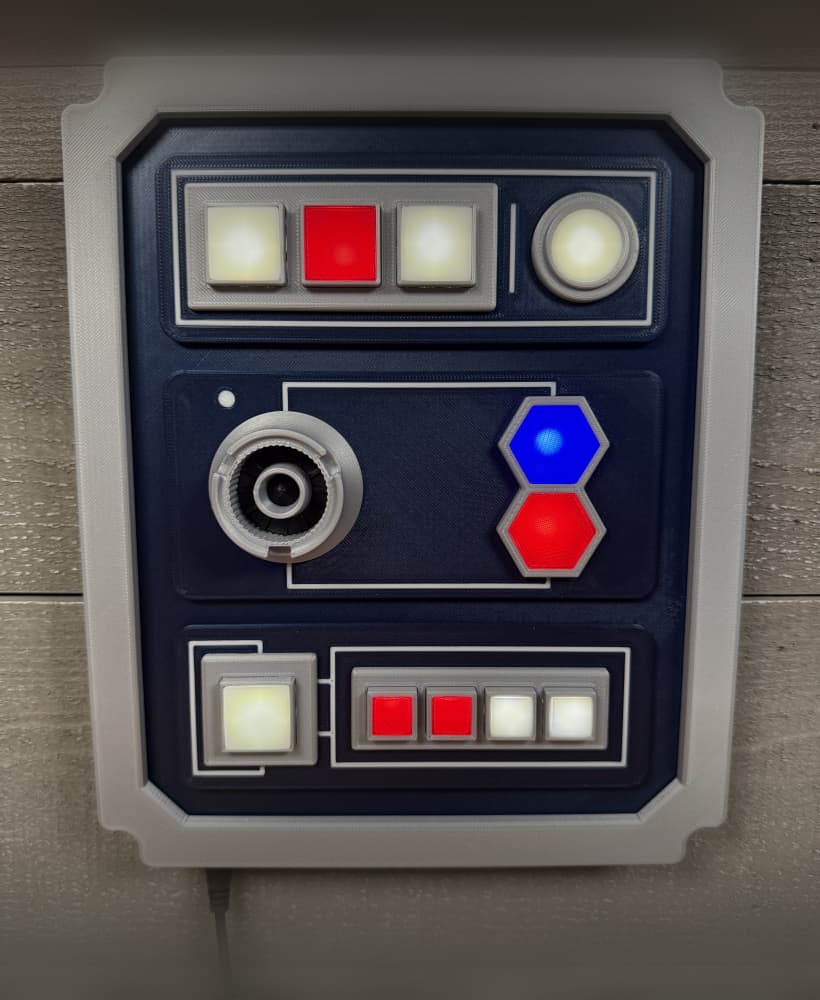
Fallout Access Granted Illuminated Panel

The Incinerator Multi-Color

The Incinerator Collapsing Lightsaber

Fallout Access Granted Panel

Devon Izara's Collapsing Lightsaber

Sakonji Tomioka Katana

Master Sword Vertical Wall Mount

Collapsing Easter Basket

Buster Sword Wall Mount

Textured Planetary Egg Container

Ezra Bridger 3rd Collapsing Lightsaber
Illuminated Galaxy Edge Control Panel #2

Illuminated Galaxy Edge Control Panel #1

Illuminated Mini Lightsaber

Galaxy Edge Control Panel #2
